Steward
分享是一種喜悅、更是一種幸福
掌機 - TRIMUI - Assembly - SPI(NAND Flash)
參考資料:
http://nano.lichee.pro/
https://mangopi.org/mangopi_r
SPI0腳位
| SPI0_CLK | PC0 |
|---|---|
| SPI0_CS | PC1 |
| SPI0_MISO | PC2 |
| SPI0_MOSI | PC3 |
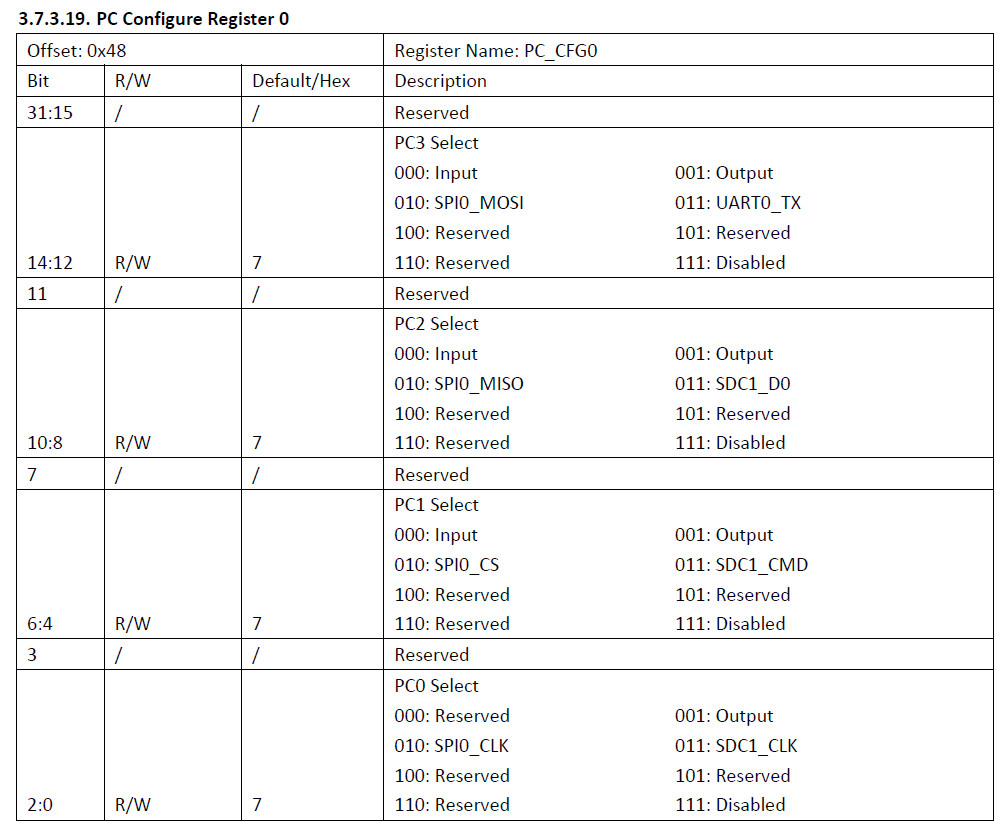
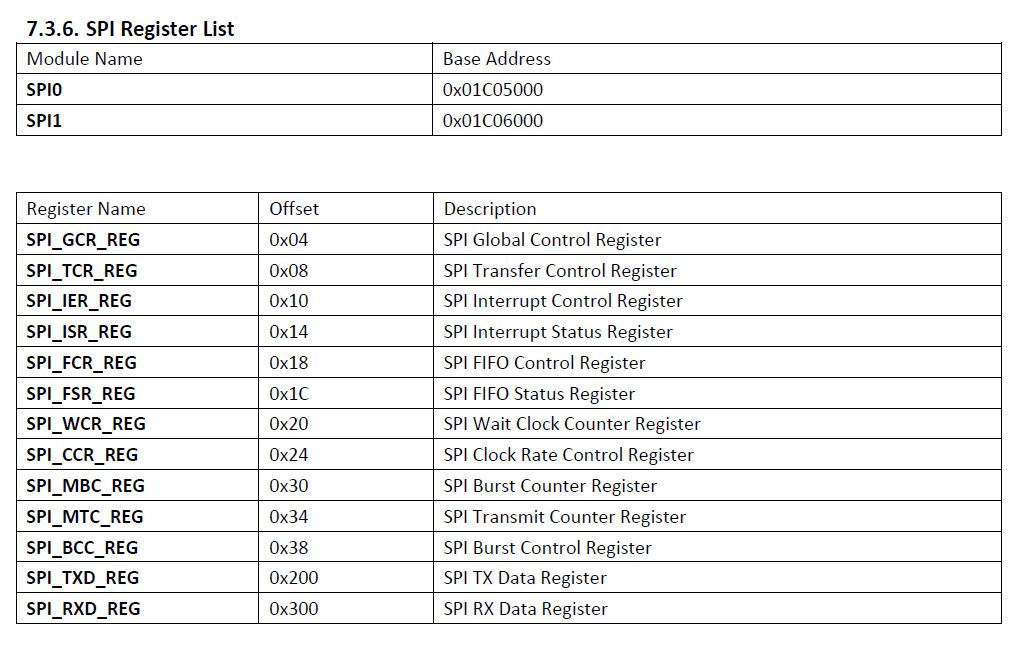
暫存器
初始步驟:
1. 設定SPI Mode為Master
2. 設定DHB模式(避免接收多餘資料)
3. 設定CS_Level為Low
4. 設定CS_Owner為SPI Controller
5. 設定SPI CDR1為50MHz
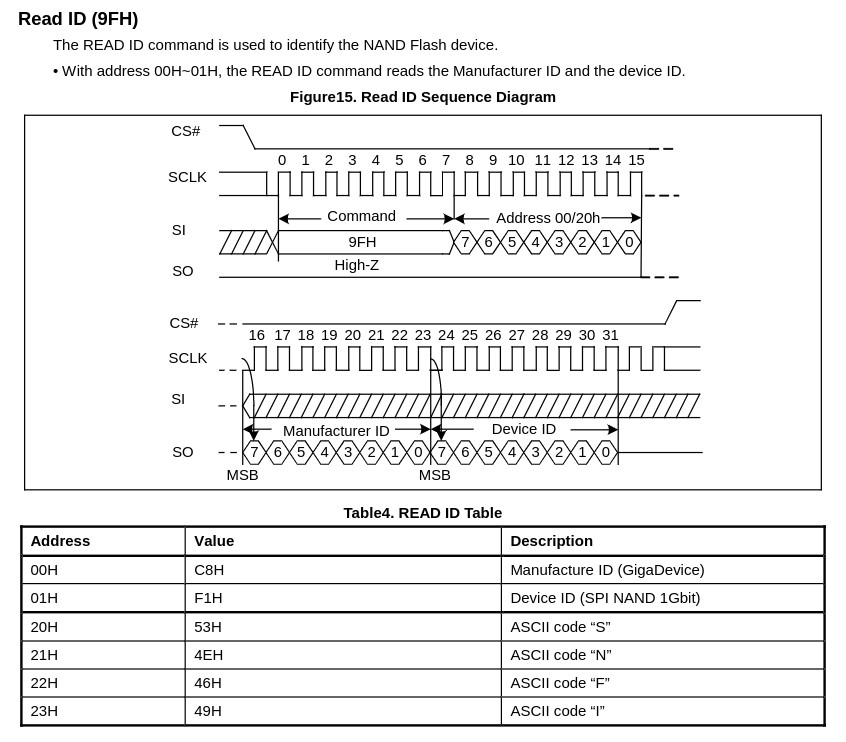
傳送、接收步驟:
1. 清除RX、TX FIFO(FCR_REG)
2. 設定TXRX全部數量(MBC_REG)
3. 設定TX數量(MTC_REG)
4. 設定TX數量(BCC_REG)
5. 開始傳送接收(TCR_REG.XCH)
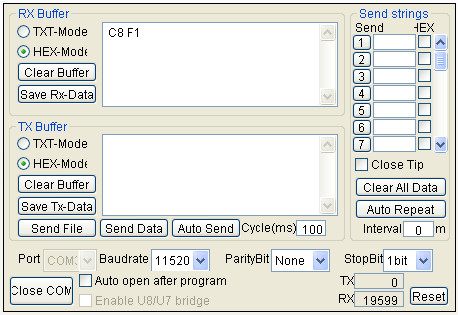
6. 等待結束後,從RXD提取資料
main.s
.global _start
.equ SPI0_BASE, 0x01c05000
.equ CCU_BASE, 0x01c20000
.equ GPIO_BASE, 0x01c20800
.equ UART1_BASE, 0x01c25400
.equ PLL_PERIPH_CTRL_REG, 0x0028
.equ AHB_APB_HCLKC_CFG_REG, 0x0054
.equ BUS_CLK_GATING_REG0, 0x0060
.equ BUS_CLK_GATING_REG2, 0x0068
.equ BUS_SOFT_RST_REG0, 0x02c0
.equ BUS_SOFT_RST_REG2, 0x02d0
.equ PA, (0x24 * 0)
.equ PC, (0x24 * 2)
.equ CFG0, 0x00
.equ DATA, 0x10
.equ RBR, 0x0000
.equ DLL, 0x0000
.equ DLH, 0x0004
.equ IER, 0x0004
.equ IIR, 0x0008
.equ LCR, 0x000c
.equ MCR, 0x0010
.equ USR, 0x007c
.equ GCR, 0x04
.equ TCR, 0x08
.equ IER, 0x10
.equ ISR, 0x14
.equ FCR, 0x18
.equ FSR, 0x1c
.equ WCR, 0x20
.equ CCR, 0x24
.equ MBC, 0x30
.equ MTC, 0x34
.equ BCC, 0x38
.equ TXD, 0x200
.equ RXD, 0x300
.arm
.text
_start:
.long 0xea000016
.byte 'e', 'G', 'O', 'N', '.', 'B', 'T', '0'
.long 0, __spl_size
.byte 'S', 'P', 'L', 2
.long 0, 0
.long 0, 0, 0, 0, 0, 0, 0, 0
.long 0, 0, 0, 0, 0, 0, 0, 0
_vector:
b reset
b .
b .
b .
b .
b .
b .
b .
reset:
ldr r0, =CCU_BASE
ldr r1, =0x80041800
str r1, [r0, #PLL_PERIPH_CTRL_REG]
ldr r1, =0x00003180
str r1, [r0, #AHB_APB_HCLKC_CFG_REG]
ldr r1, =(1 << 21)
str r1, [r0, #BUS_CLK_GATING_REG2]
str r1, [r0, #BUS_SOFT_RST_REG2]
ldr r1, =(1 << 20)
str r1, [r0, #BUS_CLK_GATING_REG0]
str r1, [r0, #BUS_SOFT_RST_REG0]
ldr r0, =GPIO_BASE
ldr r1, =0x5500
str r1, [r0, #(PA + CFG0)]
ldr r1, =0x2222
str r1, [r0, #(PC + CFG0)]
ldr r0, =UART1_BASE
ldr r1, =0x00
str r1, [r0, #IER]
ldr r1, =0xf7
str r1, [r0, #IIR]
ldr r1, =0x00
str r1, [r0, #MCR]
ldr r1, [r0, #LCR]
orr r1, #(1 << 7)
str r1, [r0, #LCR]
ldr r1, =54
str r1, [r0, #DLL]
ldr r1, =0x00
str r1, [r0, #DLH]
ldr r1, [r0, #LCR]
bic r1, #(1 << 7)
str r1, [r0, #LCR]
ldr r1, [r0, #LCR]
bic r1, #0x1f
orr r1, #0x03
str r1, [r0, #LCR]
ldr r4, =SPI0_BASE
ldr r1, =(1 << 1) | (1 << 0)
str r1, [r4, #GCR]
ldr r1, =(1 << 2) | (1 << 8)
str r1, [r4, #TCR]
ldr r1, =(1 << 8)
str r1, [r4, #CCR]
ldr r2, =(1 << 31) | (1 << 15)
str r2, [r4, #FCR]
1:
ldr r1, [r4, #FCR]
tst r1, r2
bne 1b
ldr r1, =4
str r1, [r4, #MBC]
ldr r1, =2
str r1, [r4, #MTC]
ldr r1, =2
str r1, [r4, #BCC]
ldr r1, =0x9f
strb r1, [r4, #TXD]
ldr r1, =0x00
strb r1, [r4, #TXD]
ldr r1, [r4, #TCR]
orr r1, #(1 << 31)
str r1, [r4, #TCR]
1:
ldr r1, [r4, #TCR]
tst r1, #(1 << 31)
bne 1b
ldrb r0, [r4, #RXD]
bl send_byte
ldrb r0, [r4, #RXD]
bl send_byte
main:
b main
send_byte:
push {lr}
ldr r1, =UART1_BASE
1:
ldr r2, [r1, #USR]
tst r2, #(1 << 1)
beq 1b
strb r0, [r1, #RBR]
pop {pc}
.end
P.S. 目前板子是焊接GD5F1GQ4UAY NAND Flash
GD5F1GQ4UAY
完成