Miyoo >> Assembly
Timer0
參考資料:
1. pdf
2. lichee
3. mangopi_r
4. allwinner
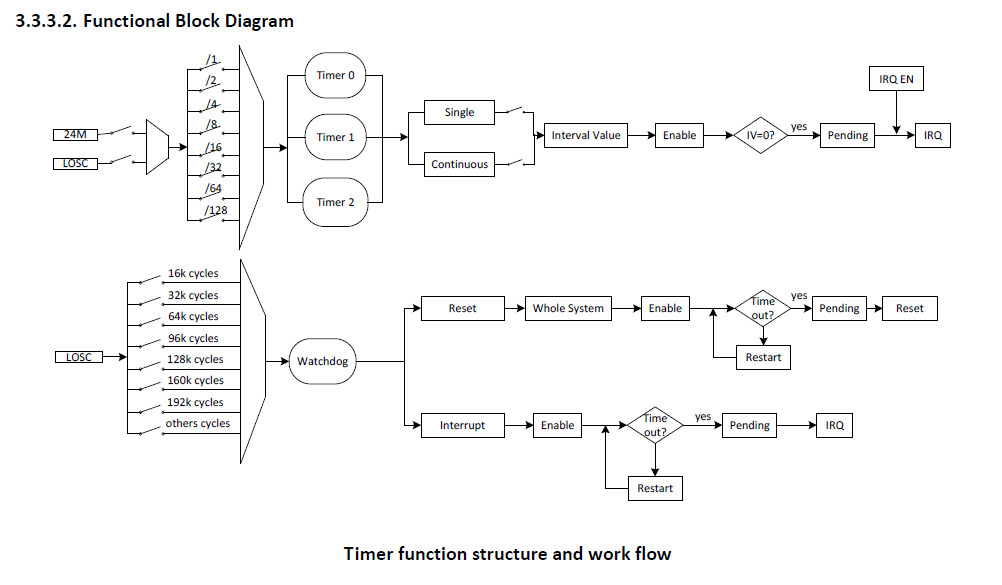
Work Flow
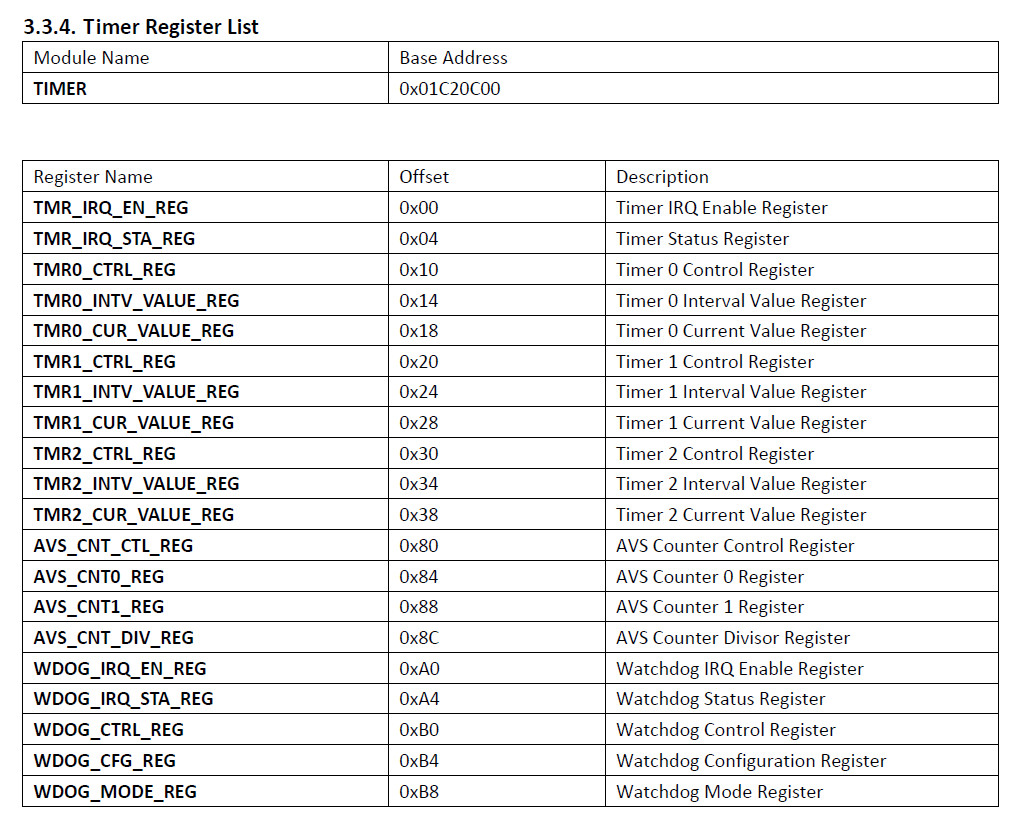
暫存器
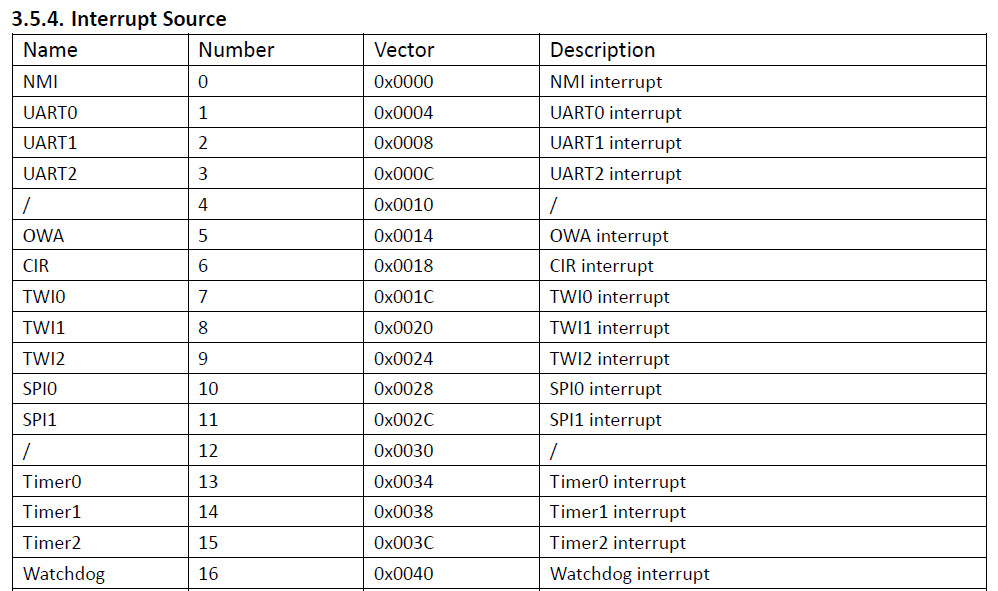
中斷
Timer0時間
Ticks = LOSC/(TMR0_CLK_PRES*TMR0_INTV_VALUE_REG) = 32KHz/(128*256) = 1Hz
main.s
.global _start
.equiv GPIO_BASE, 0x01c20800
.equiv TIMER_BASE, 0x01c20c00
.equiv INTC_BASE, 0x01c20400
.equiv PA, (0x24 * 0)
.equiv PORT_CFG0, 0x00
.equiv PORT_DATA, 0x10
.equiv INTC_BASE_ADDR_REG, 0x04
.equiv INTC_PEND_REG0, 0x10
.equiv INTC_PEND_REG1, 0x14
.equiv INTC_EN_REG0, 0x20
.equiv INTC_EN_REG1, 0x24
.equiv INTC_MASK_REG0, 0x30
.equiv INTC_MASK_REG1, 0x34
.equiv INTC_RESP_REG0, 0x40
.equiv INTC_RESP_REG1, 0x44
.equiv INTC_FF_REG0, 0x50
.equiv INTC_FF_REG1, 0x54
.equiv TMR_IRQ_EN_REG, 0x00
.equiv TMR_IRQ_STA_REG, 0x04
.equiv TMR0_CTRL_REG, 0x10
.equiv TMR0_INTV_VALUE_REG, 0x14
.equiv TMR0_CUR_VALUE_REG, 0x18
.arm
.text
_start:
.long 0xea000016
.byte 'e', 'G', 'O', 'N', '.', 'B', 'T', '0'
.long 0, __spl_size
.byte 'S', 'P', 'L', 2
.long 0, 0
.long 0, 0, 0, 0, 0, 0, 0, 0
.long 0, 0, 0, 0, 0, 0, 0, 0
_vector:
b reset
b .
b .
b .
b .
b .
ldr pc, _irq
b .
_irq: .word irq_handler
irq_handler:
ldr r0, =GPIO_BASE
ldr r1, =0x00
str r1, [r0, #(PA + PORT_DATA)]
subs pc, lr, #4
reset:
mrc p15, 0, r0, c1, c0, 0
bic r0, #(1 << 13)
mcr p15, 0, r0, c1, c0, 0
adr r0, _vector
mrc p15, 0, r2, c1, c0, 0
ands r2, r2, #(1 << 13)
ldreq r1, =0x00000000
ldrne r1, =0xffff0000
ldmia r0!, {r2-r8, r10}
stmia r1!, {r2-r8, r10}
ldmia r0!, {r2-r8, r10}
stmia r1!, {r2-r8, r10}
mrs r0, cpsr
bic r0, #0x80
msr cpsr_c, r0
ldr r0, =INTC_BASE
ldr r1, =(1 << 13)
str r1, [r0, #INTC_EN_REG0]
ldr r1, =~(1 << 13)
str r1, [r0, #INTC_MASK_REG0]
ldr r0, =GPIO_BASE
ldr r1, =0x10
str r1, [r0, #(PA + PORT_CFG0)]
ldr r1, =0x02
str r1, [r0, #(PA + PORT_DATA)]
ldr r0, =TIMER_BASE
ldr r1, =256
str r1, [r0, #TMR0_INTV_VALUE_REG]
ldr r1, =(7 << 4) | (1 << 1) | 1
str r1, [r0, #TMR0_CTRL_REG]
ldr r1, =1
str r1, [r0, #TMR_IRQ_EN_REG]
str r1, [r0, #TMR_IRQ_STA_REG]
b .
.end
完成

