Steward
分享是一種喜悅、更是一種幸福
驅動程式 - Linux Device Driver (LDD) - 使用範例 - C/C++ (PocketBeagle) - GPIO Output
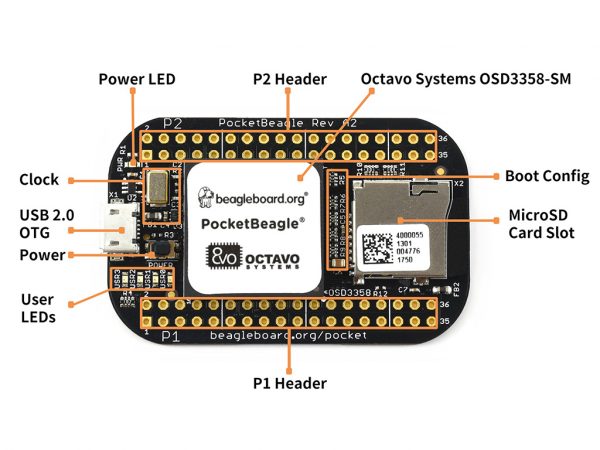
PocketBeagle開發板上有四顆USR LED,此次範例將使用USR3 LED,位置如下:
Device Tree(arch/arm/boot/dts/am335x-pocketbeagle-common.dtsi)
led@5 {
label = "beaglebone:green:usr3";
gpios = <&gpio1 24 GPIO_ACTIVE_HIGH>
linux,default-trigger = "mmc1";
default-state = "off";
};
P.S. USR3位置是GPIO1-24
Linux驅動程式可以當作是在寫韌體程式,因此,可以在驅動程式裡面直接操作GPIO暫存器,當然也可以遵循Linux Kernel規範,使用統一的GPIO操作函數,如果GPIO驅動程式沒有先移植好的話,那就只能使用暫存器的操作方式,幸運地,在這一版PocketBeagle Kernel中,已經完成GPIO驅動程式的移植,因此,此範例將使用Linux Kernel統一的GPIO操作函數
使用步驟:
1. gpio_request() 2. gpio_direction_output() 3. gpio_set_value() 4. gpio_free()
main.c
#include <linux/init.h>
#include <linux/device.h>
#include <linux/module.h>
#include <linux/delay.h>
#include <linux/kernel.h>
#include <linux/errno.h>
#include <linux/mm.h>
#include <linux/gpio.h>
MODULE_LICENSE("GPL");
MODULE_AUTHOR("Steward Fu");
MODULE_DESCRIPTION("Linux Driver");
#define USR3_LED ((32 * 1) + 24)
int ldd_init(void)
{
int c = 0;
gpio_request(USR3_LED, "USR3");
gpio_direction_output(USR3_LED, 1);
for (c = 0; c < 3; c++) {
gpio_set_value(USR3_LED, 0);
msleep(1000);
gpio_set_value(USR3_LED, 1);
msleep(1000);
}
gpio_free(USR3_LED);
return 0;
}
void ldd_exit(void)
{
}
module_init(ldd_init);
module_exit(ldd_exit);
ldd_init: 請求GPIO資源,接著設定GPIO輸出方向,最後使用迴圈點亮LED(30次)
完成