Windows Driver Model >> C/C++
Cancel IRP
參考資訊:
1. Source Code
2. canceling-irps
有處理Irp就會有Cancel Irp的時候,Cancel Irp本身就是一個很複雜的課題,司徒在這一篇教學不會做深入探討,有興趣的使用者可以參考上面的參考資訊,取而代之的,司徒只是點出,在處理Irp時,使用者要意識到該Irp可能已經被Cancel掉了,作法上,也是可以切割成很多時期,如:Irp處理前,Irp處裡中,Irp處裡後,因此,在設計驅動程式時,對於Cancel機制有必要嚴謹看待,因為,BSOD常常就是這樣發生了,不過司徒在此僅針對Irp處裡前,作簡單判斷,是否User Application已經Cancel這個Irp,如果沒有被Cancel,則Complete Irp,相反地,如果被Cancel,則Cancel Irp,Cancel作法如下:
1. CancelRoutine(NULL)
2. IoCompleteRequest(STATUS_CANCELLED)
main.c
#include <wdm.h>
#define IOCTL_QUEUE CTL_CODE(FILE_DEVICE_UNKNOWN, 0x800, METHOD_BUFFERED, FILE_ANY_ACCESS)
#define IOCTL_PROCESS CTL_CODE(FILE_DEVICE_UNKNOWN, 0x801, METHOD_BUFFERED, FILE_ANY_ACCESS)
#define DEV_NAME L"\\Device\\MyDriver"
#define SYM_NAME L"\\DosDevices\\MyDriver"
KDPC stDPC={0};
KTIMER stTime={0};
LIST_ENTRY stQueue={0};
PDEVICE_OBJECT pNextDevice=NULL;
VOID OnTimer(struct _KDPC *Dpc, PVOID DeferredContext, PVOID SystemArgument1, PVOID SystemArgument2)
{
PIRP pIrp;
PLIST_ENTRY plist;
if(IsListEmpty(&stQueue) == TRUE){
KeCancelTimer(&stTime);
DbgPrint("Finish");
}
else{
plist = RemoveHeadList(&stQueue);
pIrp = CONTAINING_RECORD(plist, IRP, Tail.Overlay.ListEntry);
if(pIrp->Cancel != TRUE){
pIrp->IoStatus.Status = STATUS_SUCCESS;
pIrp->IoStatus.Information = 0;
IoCompleteRequest(pIrp, IO_NO_INCREMENT);
DbgPrint("Complete Irp");
}
else{
pIrp->CancelRoutine = NULL;
pIrp->IoStatus.Status = STATUS_CANCELLED;
pIrp->IoStatus.Information = 0;
IoCompleteRequest(pIrp, IO_NO_INCREMENT);
DbgPrint("Cancel Irp");
}
}
}
NTSTATUS AddDevice(PDRIVER_OBJECT pOurDriver, PDEVICE_OBJECT pPhyDevice)
{
PDEVICE_OBJECT pOurDevice=NULL;
UNICODE_STRING usDeviceName;
UNICODE_STRING usSymboName;
RtlInitUnicodeString(&usDeviceName, DEV_NAME);
IoCreateDevice(pOurDriver, 0, &usDeviceName, FILE_DEVICE_UNKNOWN, 0, FALSE, &pOurDevice);
RtlInitUnicodeString(&usSymboName, SYM_NAME);
IoCreateSymbolicLink(&usSymboName, &usDeviceName);
pNextDevice = IoAttachDeviceToDeviceStack(pOurDevice, pPhyDevice);
pOurDevice->Flags&= ~DO_DEVICE_INITIALIZING;
pOurDevice->Flags|= DO_BUFFERED_IO;
InitializeListHead(&stQueue);
KeInitializeTimer(&stTime);
KeInitializeDpc(&stDPC, OnTimer, pOurDevice);
return STATUS_SUCCESS;
}
void Unload(PDRIVER_OBJECT pOurDriver)
{
pOurDriver = pOurDriver;
}
NTSTATUS IrpPnp(PDEVICE_OBJECT pOurDevice, PIRP pIrp)
{
PIO_STACK_LOCATION psk = IoGetCurrentIrpStackLocation(pIrp);
UNICODE_STRING usSymboName;
if(psk->MinorFunction == IRP_MN_REMOVE_DEVICE){
RtlInitUnicodeString(&usSymboName, SYM_NAME);
IoDeleteSymbolicLink(&usSymboName);
IoDetachDevice(pNextDevice);
IoDeleteDevice(pOurDevice);
}
IoSkipCurrentIrpStackLocation(pIrp);
return IoCallDriver(pNextDevice, pIrp);
}
NTSTATUS IrpIOCTL(PDEVICE_OBJECT pOurDevice, PIRP pIrp)
{
LARGE_INTEGER stTimePeriod;
PIO_STACK_LOCATION psk = IoGetCurrentIrpStackLocation(pIrp);
switch(psk->Parameters.DeviceIoControl.IoControlCode){
case IOCTL_QUEUE:
DbgPrint("IOCTL_QUEUE");
InsertHeadList(&stQueue, &pIrp->Tail.Overlay.ListEntry);
IoMarkIrpPending(pIrp);
return STATUS_PENDING;
case IOCTL_PROCESS:
DbgPrint("IOCTL_PROCESS");
stTimePeriod.HighPart|= -1;
stTimePeriod.LowPart = -10000000;
KeSetTimerEx(&stTime, stTimePeriod, 1000, &stDPC);
break;
}
pIrp->IoStatus.Information = 0;
pIrp->IoStatus.Status = STATUS_SUCCESS;
IoCompleteRequest(pIrp, IO_NO_INCREMENT);
return STATUS_SUCCESS;
}
NTSTATUS IrpFile(PDEVICE_OBJECT pOurDevice, PIRP pIrp)
{
PIO_STACK_LOCATION psk = IoGetCurrentIrpStackLocation(pIrp);
switch(psk->MajorFunction){
case IRP_MJ_CREATE:
DbgPrint("IRP_MJ_CREATE");
break;
case IRP_MJ_CLOSE:
DbgPrint("IRP_MJ_CLOSE");
break;
}
IoCompleteRequest(pIrp, IO_NO_INCREMENT);
return STATUS_SUCCESS;
}
NTSTATUS DriverEntry(PDRIVER_OBJECT pOurDriver, PUNICODE_STRING pOurRegistry)
{
pOurDriver->MajorFunction[IRP_MJ_PNP] = IrpPnp;
pOurDriver->MajorFunction[IRP_MJ_CREATE] =
pOurDriver->MajorFunction[IRP_MJ_CLOSE] = IrpFile;
pOurDriver->MajorFunction[IRP_MJ_DEVICE_CONTROL] = IrpIOCTL;
pOurDriver->DriverExtension->AddDevice = AddDevice;
pOurDriver->DriverUnload = Unload;
return STATUS_SUCCESS;
}
AddDevice()初始List以及DPC Timer,DPC Timer用來定期確認List是否還有資料需要處理,當然,使用Thread檢查或許更恰當些
IrpIOCTL()IOCTL_QUEUE代表該IOCTL會被Queue起來,稍後處理,而當收到IOCTL_PROCESS時,則啟動DPC Timer開始處理那些被Queue起來的Irp
OnTimer()處理Queue裡面的Irp,在處理前,先判斷該Irp是否已經被Cancel了
app.c
#define INITGUID
#include <windows.h>
#include <winioctl.h>
#include <strsafe.h>
#include <setupapi.h>
#include <stdio.h>
#include <stdlib.h>
#define IOCTL_QUEUE CTL_CODE(FILE_DEVICE_UNKNOWN, 0x800, METHOD_BUFFERED, FILE_ANY_ACCESS)
#define IOCTL_PROCESS CTL_CODE(FILE_DEVICE_UNKNOWN, 0x801, METHOD_BUFFERED, FILE_ANY_ACCESS)
int __cdecl main(int argc, char* argv[])
{
int i=0;
DWORD dwRet = 0;
HANDLE hFile = NULL;
OVERLAPPED ov[3]={0};
hFile = CreateFile("\\\\.\\MyDriver", GENERIC_READ | GENERIC_WRITE, 0, NULL, OPEN_EXISTING, FILE_FLAG_OVERLAPPED | FILE_ATTRIBUTE_NORMAL, NULL);
if (hFile == INVALID_HANDLE_VALUE) {
printf("failed to open mydriver\n");
return -1;
}
for(i=0; i<3; i++){
memset(&ov[i], 0, sizeof(ov[i]));
ov[i].hEvent = CreateEvent(NULL, TRUE, FALSE, NULL);
printf("queue event\n");
DeviceIoControl(hFile, IOCTL_QUEUE, NULL, 0, NULL, 0, &dwRet, &ov[i]);
}
printf("process all of events\n");
DeviceIoControl(hFile, IOCTL_PROCESS, NULL, 0, NULL, 0, &dwRet, NULL);
Sleep(1000);
CancelIo(hFile);
for(i=0; i<3; i++){
WaitForSingleObject(ov[i].hEvent, INFINITE);
CloseHandle(ov[i].hEvent);
printf("wait complete\n");
}
CloseHandle(hFile);
return 0;
}
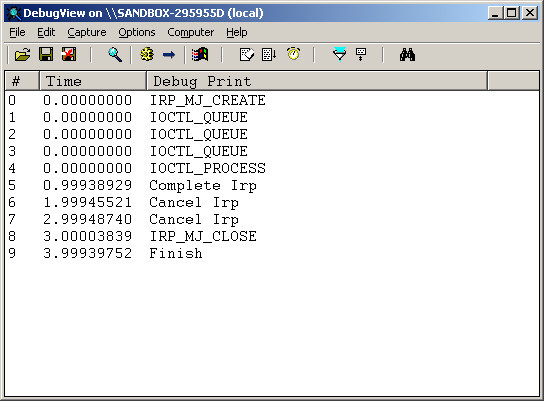
結果